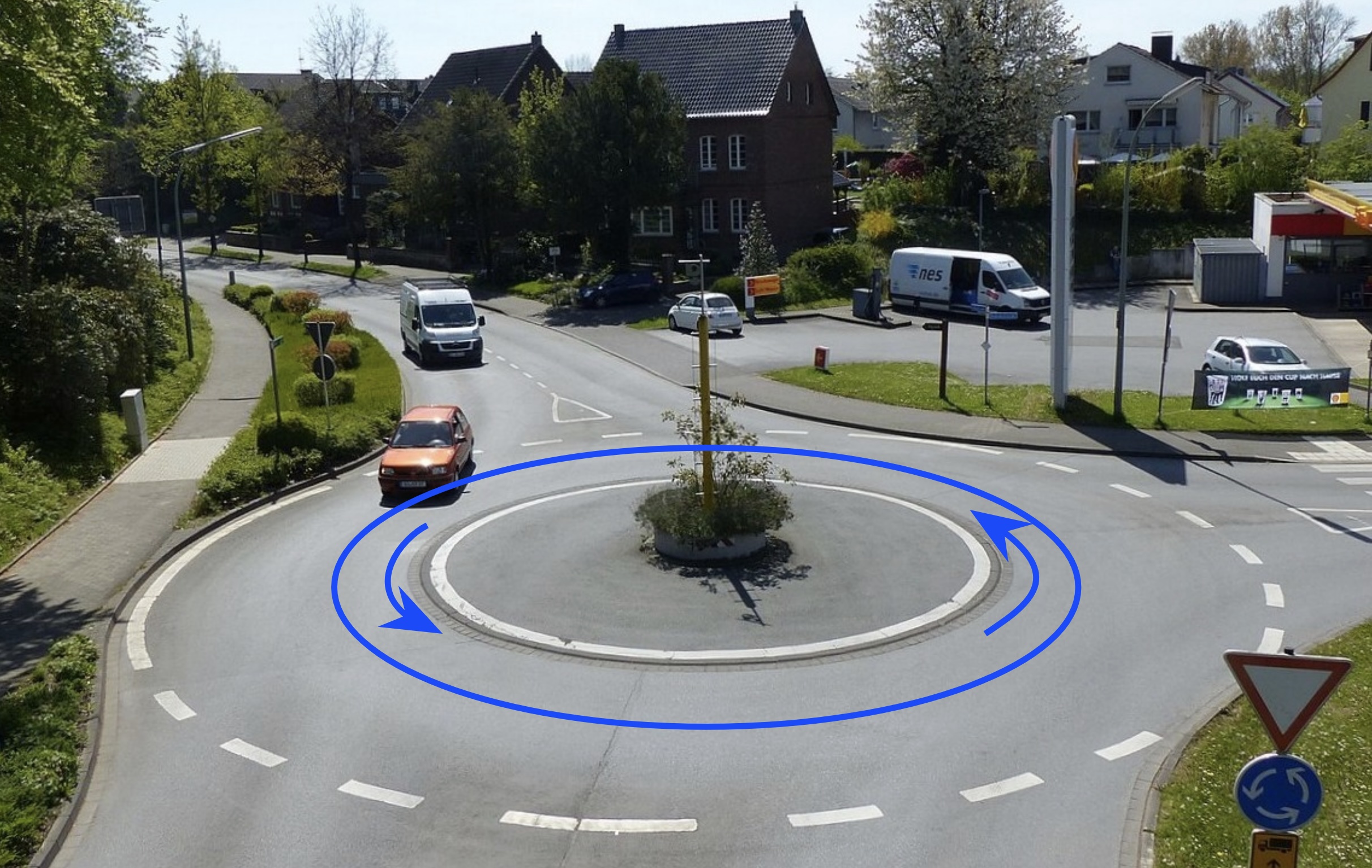
Dans un rond-point, vous pouvez tourner indéfiniment en cercle :
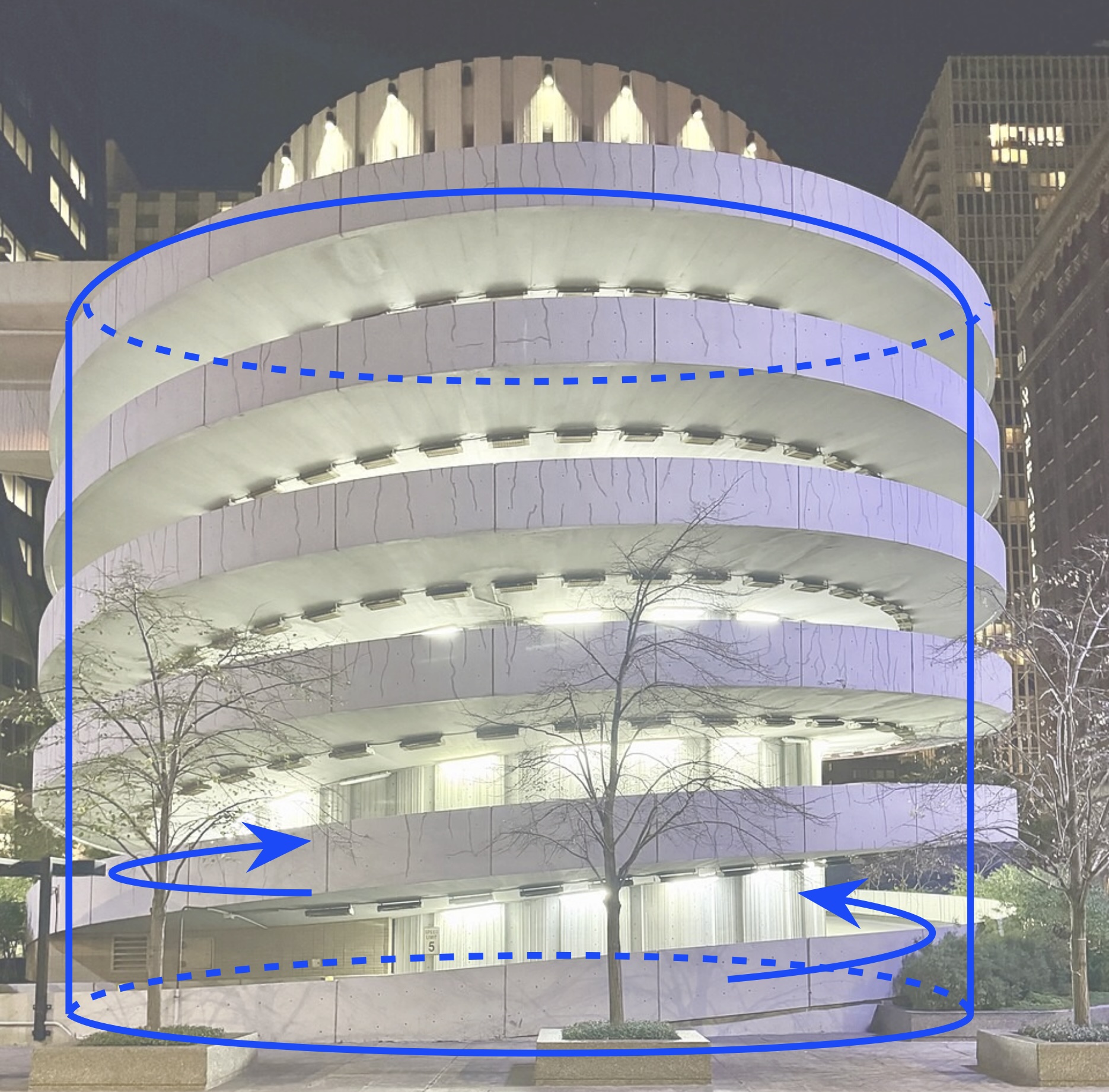
Si vous montez ou descendez dans une rampe de parking cylindrique, vous suivez une hélice :
En somme, une hélice est une courbe qui combine un mouvement circulaire avec un mouvement vertical (ascendant ou descendant).
[À propos des images : rond-point
(CC 3.0 ; lignes ajoutées) ; parking (CC SA 2.0 ; lignes ajoutées).]
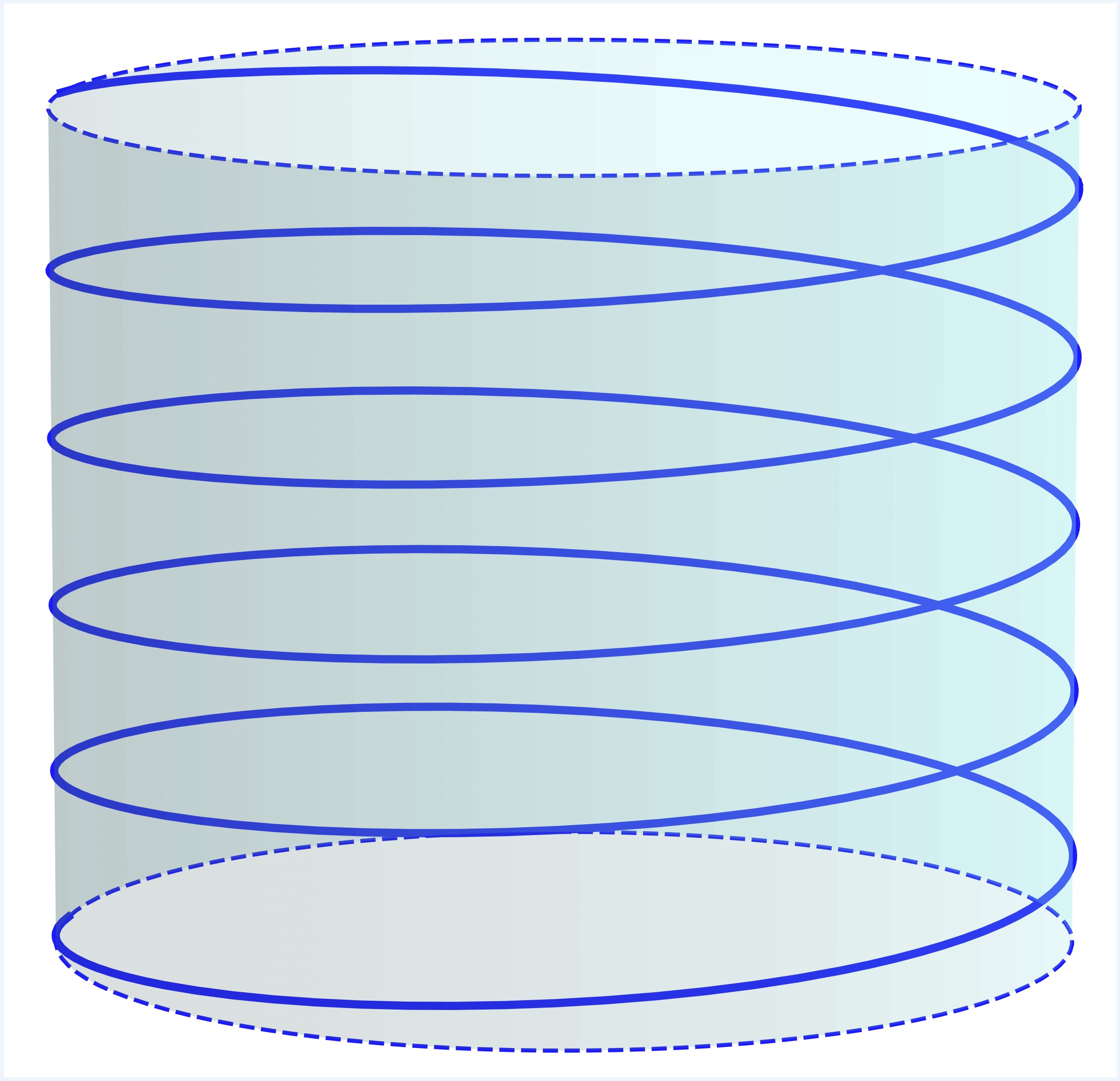
Définition des hélices cylindriques
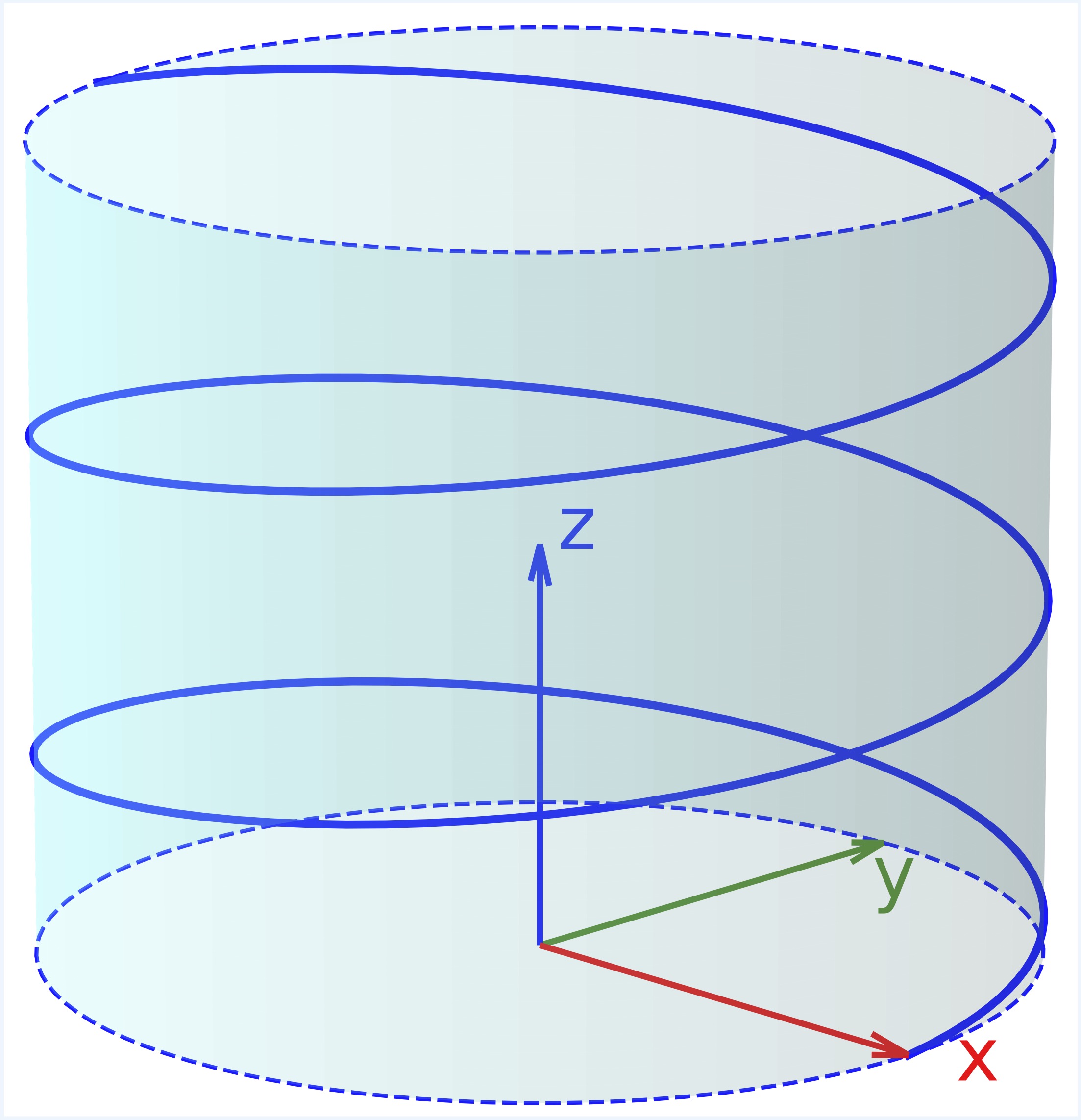
Une hélice cylindrique est une courbe tracée sur un cylindre, correspondant à la trajectoire d'un point qui tourne autour du cylindre à vitesse constante tout en montant (ou descendant) à vitesse constante.
Si l'on considère un cylindre infini, l'hélice peut s'étendre indéfiniment dans une ou deux directions, et sa longueur est alors infinie.
Prenons un système de coordonnées \(xyz\) tel que l'axe du cylindre soit aligné avec l'axe \(z\), et soit \(r\) le rayon du cylindre. Considérons un point \(P\) se déplaçant sur l'hélice à vitesse constante.
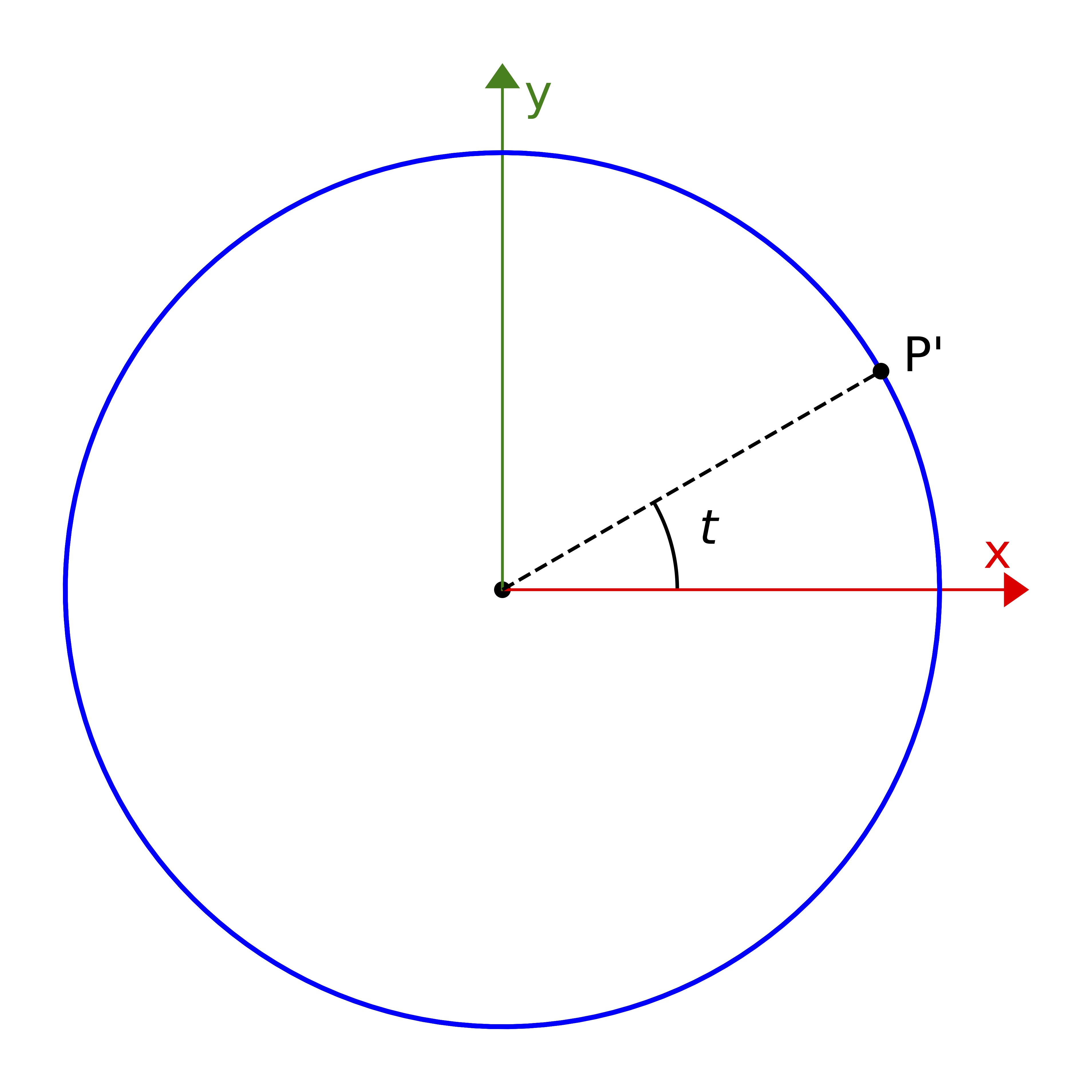
Examinons la projection sur le plan \(xy\). Supposons que la projection \(P'\) du point \(P\) tourne dans le sens inverse des aiguilles d'une montre autour de l'origine (à vitesse constante). Si \(P'\) commence aux coordonnées \((r,0)\) à l'instant \(t=0\) et effectue une rotation complète à \(t = 2\pi\), alors ses coordonnées à l'instant \(t\) sont :
\[
(x,y) = (r\cos(t), r\sin(t))
\]
où apparaissent les fonctions trigonométriques sinus et cosinus. L'angle décrivant la position de \(P'\) sur le cercle augmente constamment et est, à chaque instant, égal à \(t\).
Le point \(P\) se déplace également verticalement à vitesse constante. Supposons que la coordonnée \(z\) parte de 0, alors à l'instant \(t\), la coordonnée \(z\) vaut :
\[
z = c\,t
\]
où \(c\) est une constante : positive si le point monte, négative s'il descend.
Les coordonnées du point \(P\) à l'instant \(t\) sont donc :
\[
(x,y, z) = (r\cos(t), r\sin(t), c\,t)
\]
Une description géométrique des hélices
On peut également décrire les hélices géométriquement.
Une hélice cylindrique est une courbe située sur un cylindre qui forme un angle aigu constant avec l'axe du cylindre en chaque point. Cette propriété concerne la direction instantanée de la courbe en un point donné.
Si l'on autorisait un angle nul, le point se déplacerait parallèlement à l'axe du cylindre sans tourner. Avec un angle de \(90^\circ\), le point ne ferait que tourner autour de l'axe sans monter ni descendre.
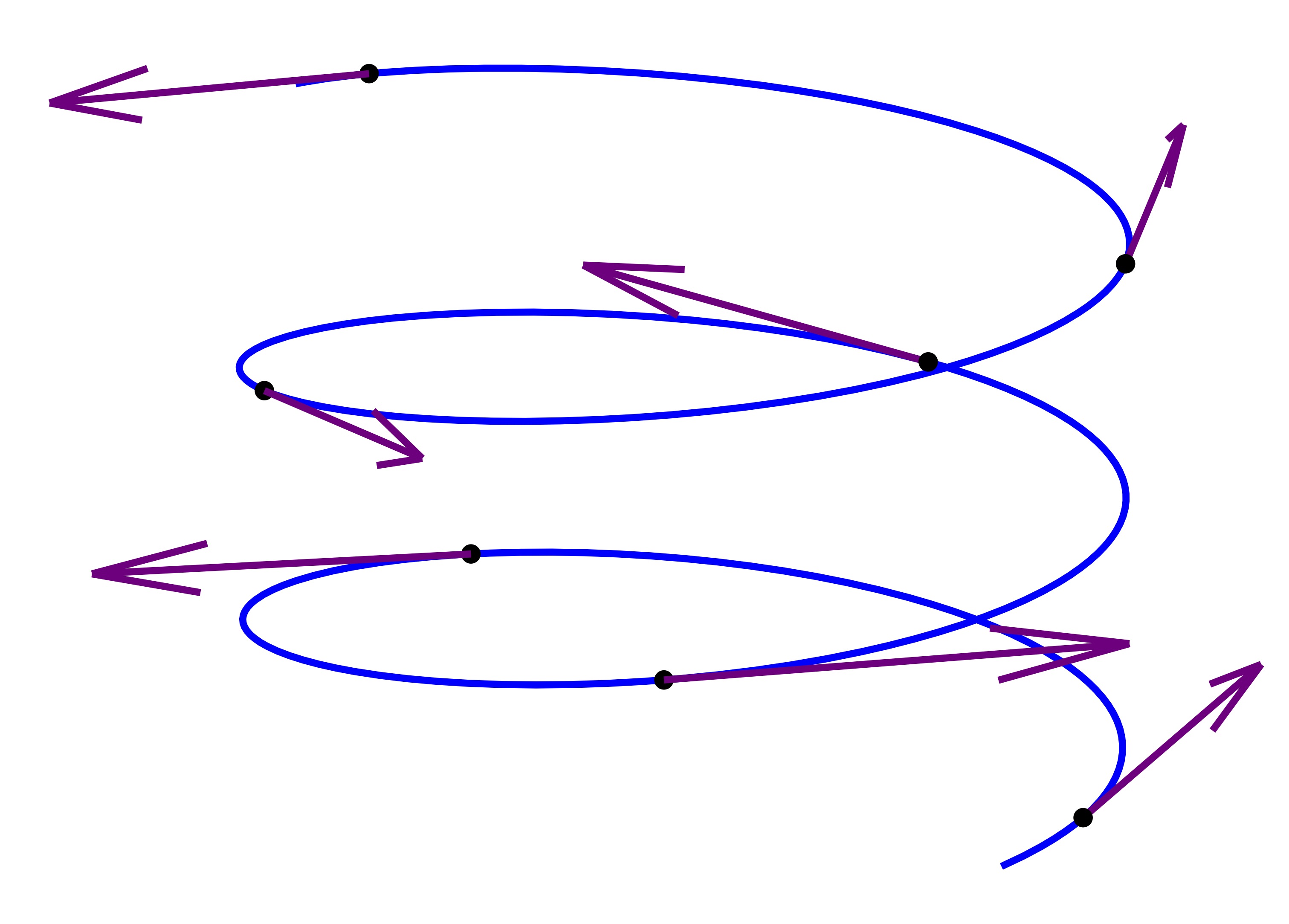
La direction d'une courbe en un point est donnée par le vecteur tangent
Si l'on considère la courbe comme la trajectoire d'un point \(P\), le vecteur tangent (à l'instant \(t\)) est un vecteur dont la direction est celle de la courbe et dont la longueur dépend de la vitesse du point.
Pour calculer le vecteur tangent, on prend la dérivée des fonctions qui expriment les coordonnées en fonction du temps \(t\). Pour l'hélice définie par :
\[
(x,y, z) = (r\cos(t), r\sin(t), c\,t)
\]
on obtient :
\[
\begin{pmatrix}
x'\\
y'\\
z'\\
\end{pmatrix} = \begin{pmatrix}
-r\sin(t) \\
r\cos(t) \\
c
\end{pmatrix}
\]
L'angle \(\phi\) que fait l'hélice avec l'axe \(z\) satisfait:
\[
\tan(\phi) = \dfrac{\text{norme de la composante horizontale du vecteur tangent}}{\text{norme de la composante verticale du vecteur tangent}}
\]
Pour une hélice, ce rapport est constant.
La composante horizontale du vecteur tangent est \((-r\sin(t), r\cos(t))\), dont la norme vaut \(r\), tandis que la composante verticale a pour norme \(|c|\). Ainsi,
\[
\tan( \phi) = \dfrac{r}{|c|},
\]
ce qui montre que ce rapport est constant. L'hélice forme donc un angle constant avec l'axe du cylindre.
{kind=link}
{kind=link}