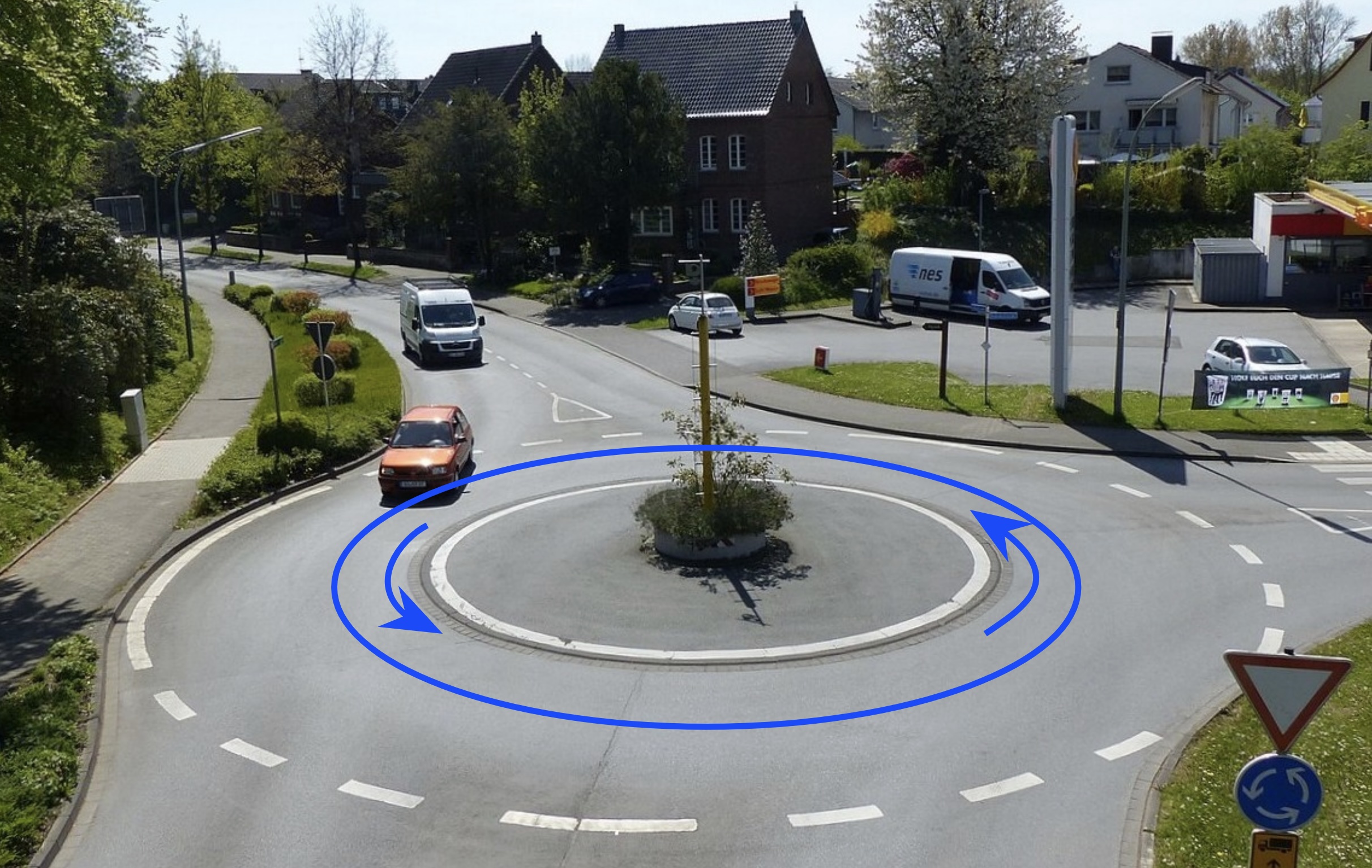
In a roundabout, you can drive around and around in a circle:
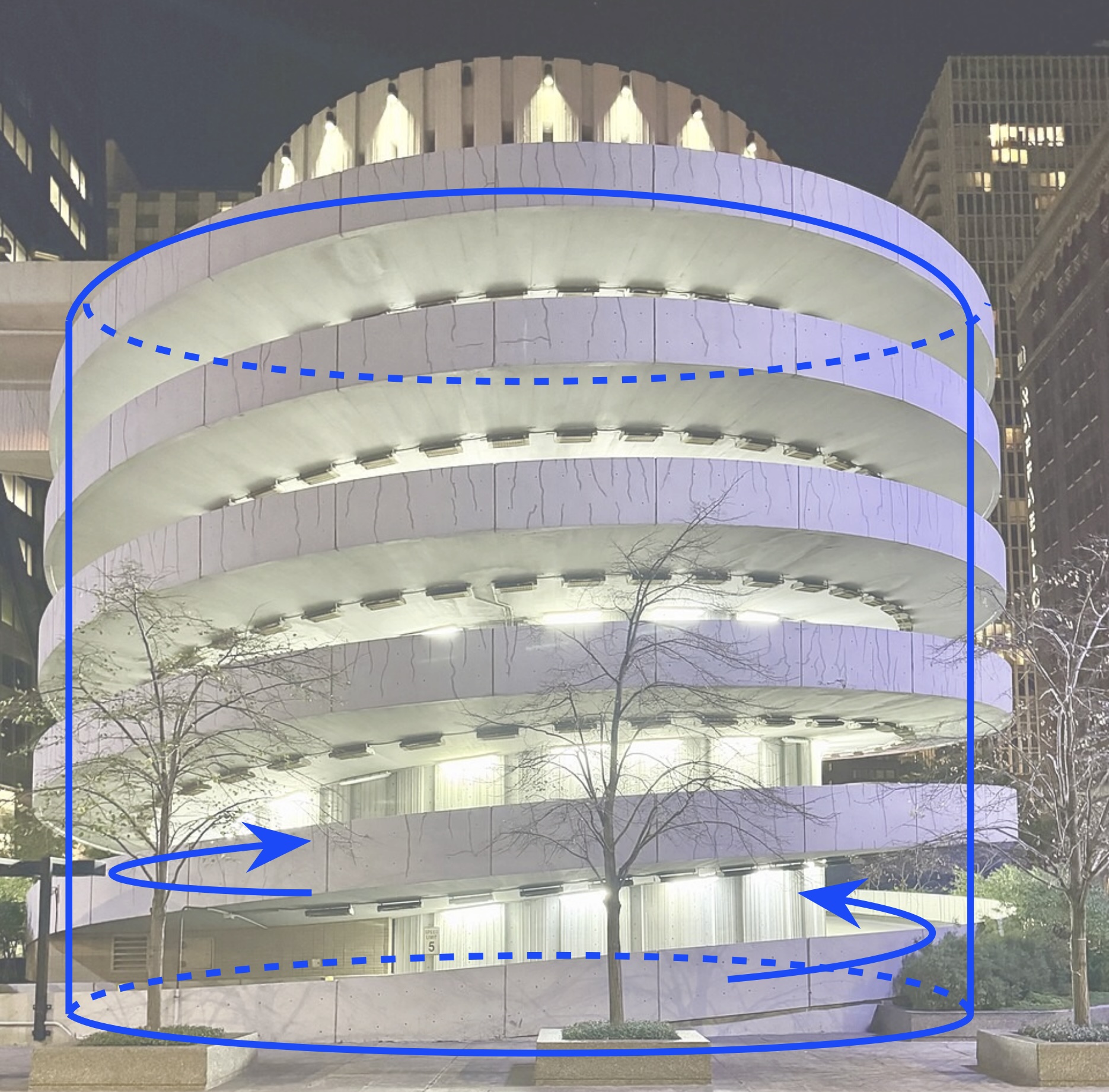
If you drive up or down in a cylindrical parking-garage ramp, you drive along a helix:
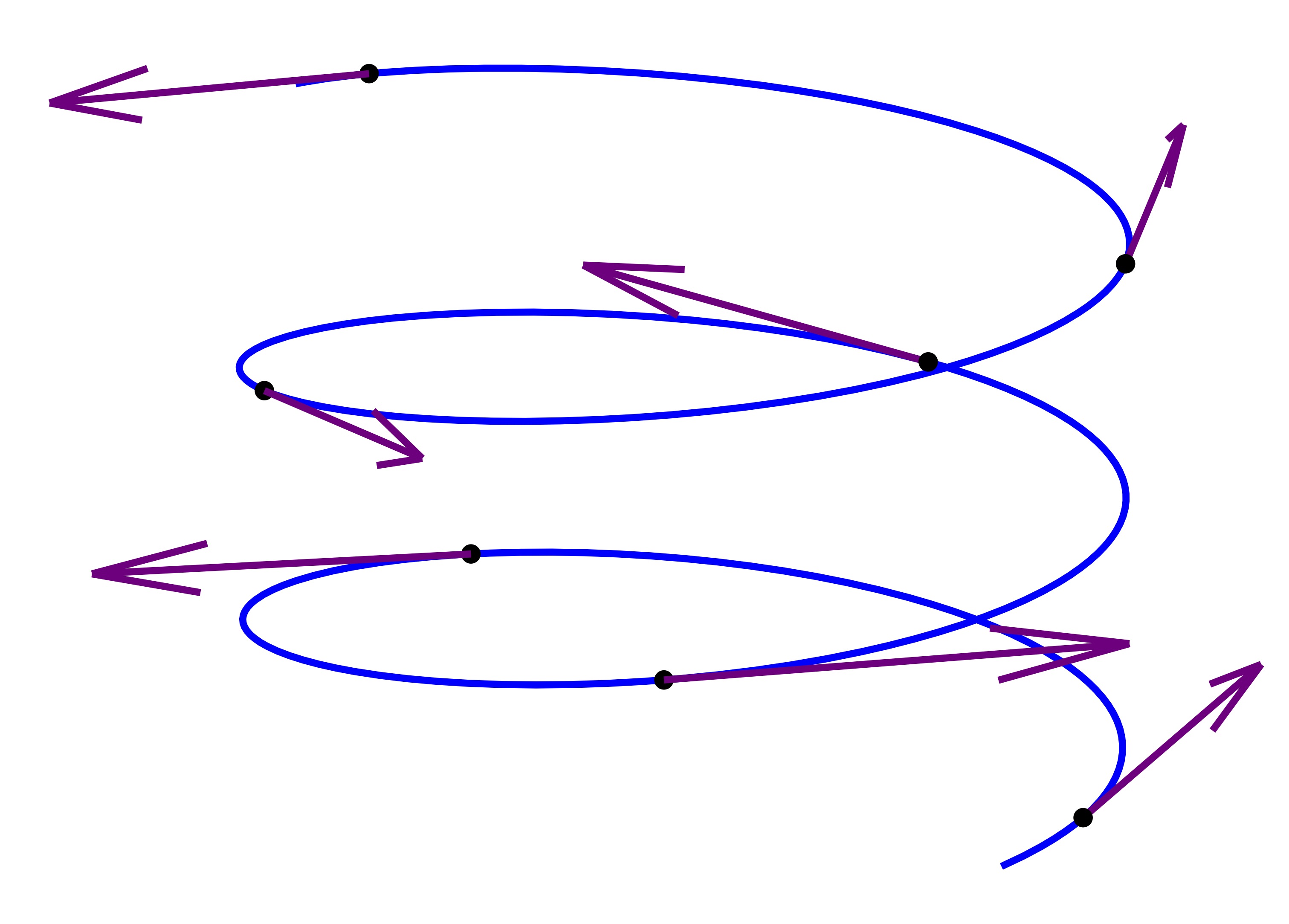
In a nutshell: the helix is a curve that combines a circular motion with a simultaneous upward (or downward) movement.
[About the pictures: roundabout
(CC 3.0; added lines); garage (CC SA 2.0; added lines).]
Definition of Cylindrical Helices
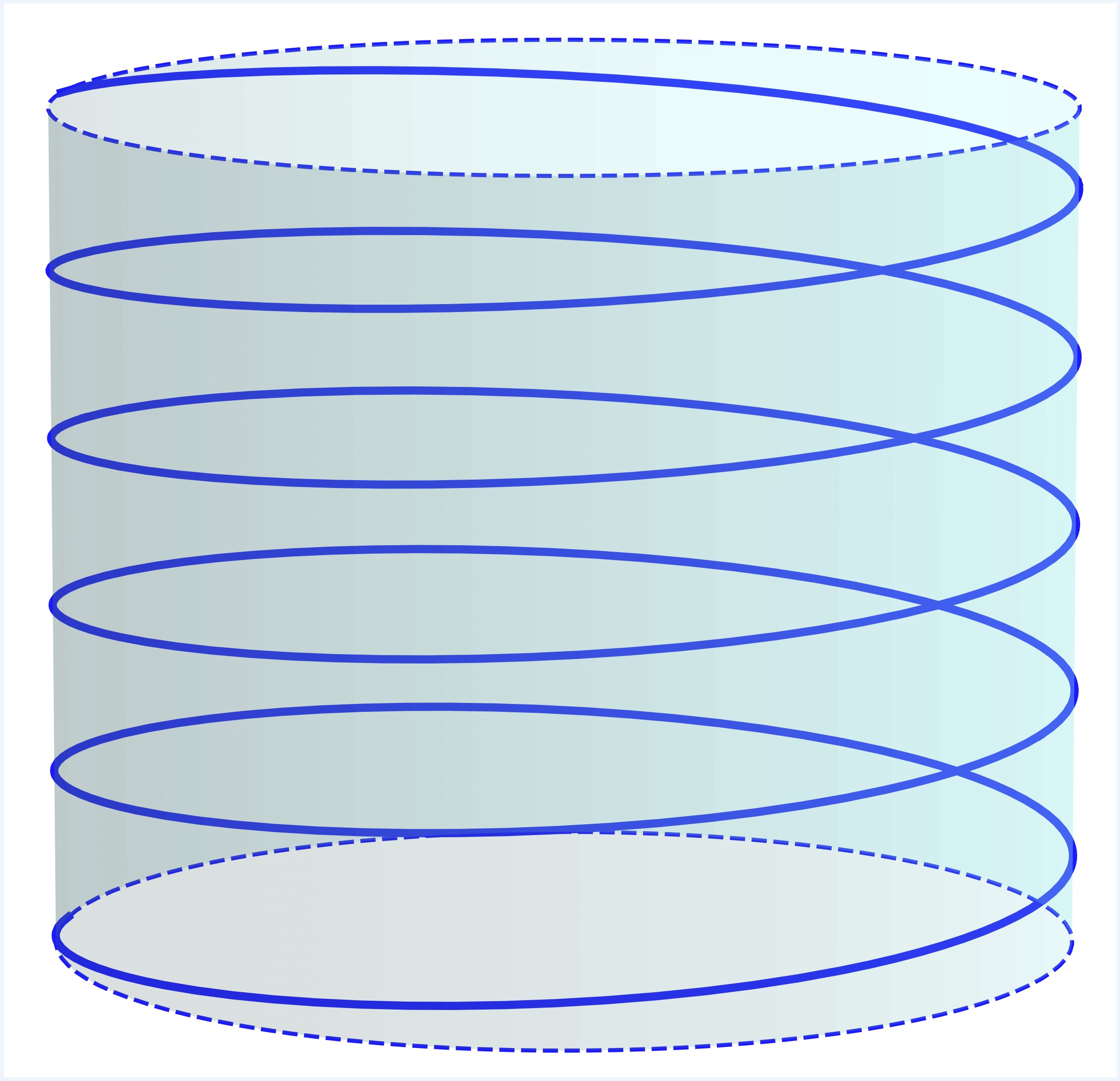
A cylindrical helix is a curve on a cylinder that is the trajectory of a point moving around the cylinder at a constant speed while simultaneously ascending (or descending) at a constant speed.
On an infinite cylinder, a helix can extend indefinitely in one or both directions, making it a curve of infinite length.
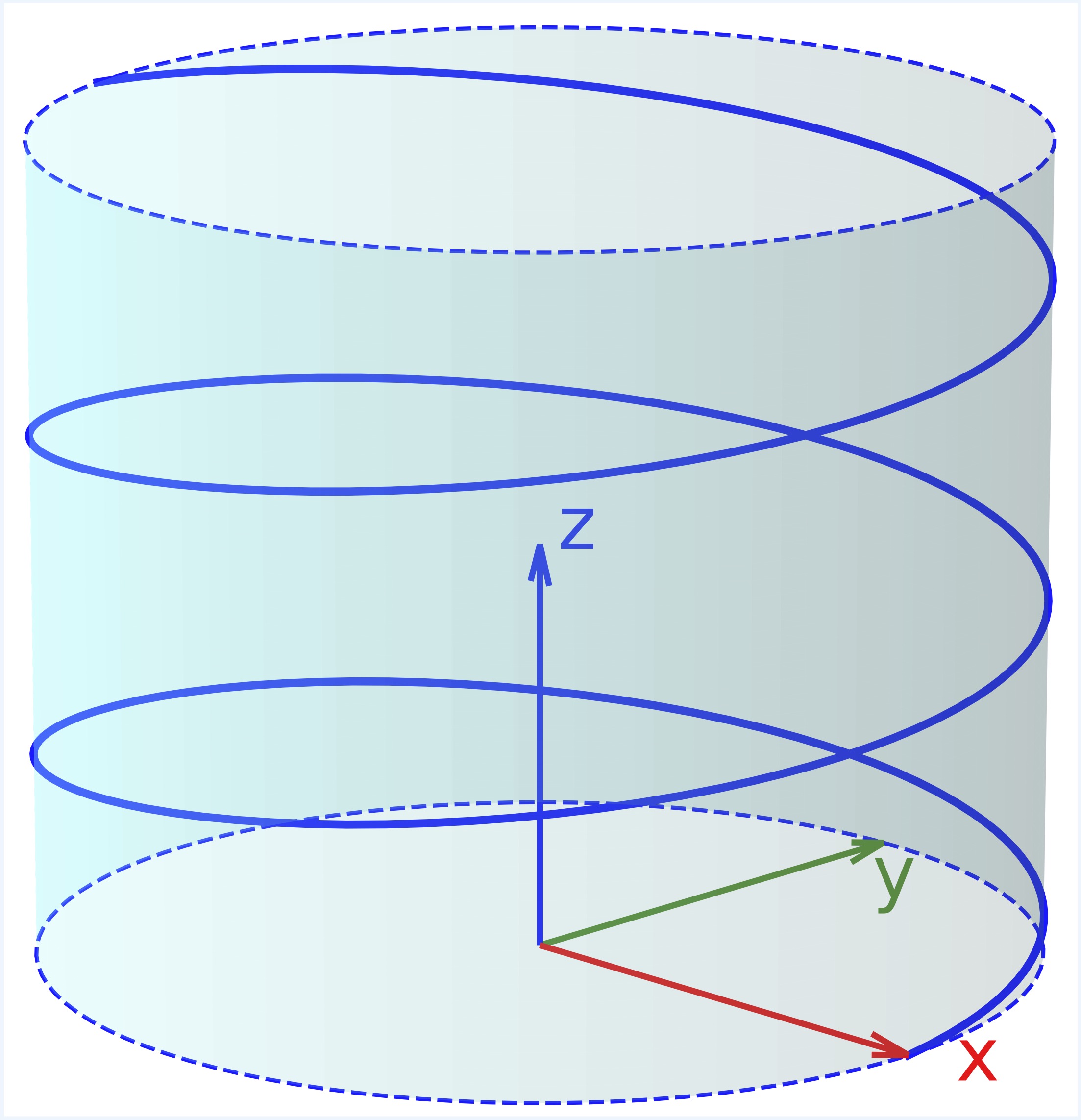
Choose a \(xyz\)-coordinate system such that the cylinder’s axis aligns with the \(z\)-axis, and let \(r\) be the cylinder’s radius. Consider a point \(P\) moving along the helix at a constant speed.
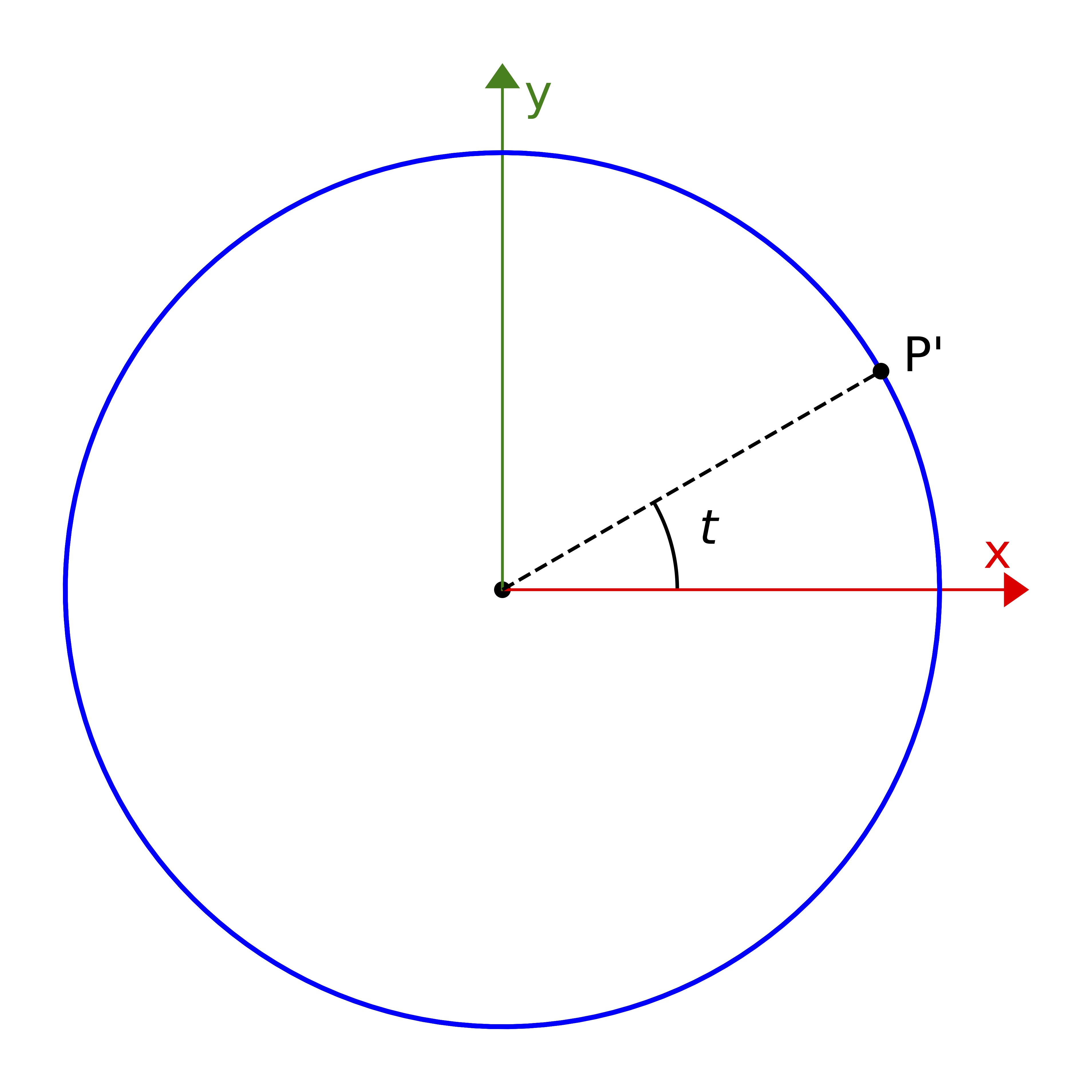
Consider the projection onto the \(xy\)-plane. Suppose that the projection \(P'\) of \(P\) rotates counterclockwise around the origin (at a constant speed). If \(P'\) starts at the coordinates \((r,0)\) at time \(t=0\) and completes one full rotation at \(t = 2\pi\), then its coordinates at time \(t\) are:
\[
(x,y) = (r\cos(t),r\sin(t))
\]
where we see the trigonometric functions sine and cosine. The polar angle describing the position of \(P'\) on the circle constantly grows and equals the time \(t\).
The point \(P\) also moves vertically at a constant speed. If \(P\) starts at height \(z = 0\) when \(t = 0\), then
\[
z = c\,t
\]
where \(c\) is a constant: positive if the point ascends, negative if it descends.
Thus the point \(P\) at time \(t\) has coordinates:
\[
(x,y, z) = (r\cos(t),r\sin(t),c\,t)
\]
A geometric description of helices
A cylindrical helix can also be described geometrically:
A cylindrical helix is a curve that lies on a cylinder that forms a constant acute angle with the cylinder’s axis at every point. This property concerns the curve's current direction at a given point.
If we allowed a zero angle, the point would move parallel to the cylinder's axis without rotating. If we allowed an angle of \(90^\circ\), the point would only rotate around the axis without ascending or descending.
The direction of a curve at a point is given by the tangent vector at that point.
If we consider a curve as the trajectory of a point \(P\), the tangent vector at time \(t\) points in the direction in which \( P \) is moving. Its length depends on the speed of \( P \).
We compute the tangent vector by taking the derivative of the functions expressing the coordinates at the time \(t\). For the helix
\[
(x,y, z) = (r\cos(t),r\sin(t),c\,t)
\]
this is
\[
\begin{pmatrix}
x'\\
y'\\
z'\\
\end{pmatrix}=\begin{pmatrix}
-r\sin(t) \\
r\cos(t) \\
c
\end{pmatrix}
\]
The angle \( \phi \) between the helix and the \(z\)-axis satisfies
\[
\tan( \phi) = \dfrac{\text{norm of the horizontal part of the tangent vector}}{\text{norm of the vertical part of the tangent vector}}
\]
This ratio must remain constant.
The horizontal part of the tangent vector is \((-r\sin(t), r\cos(t))\), and has a norm of \(r\), while the vertical part has a norm of \(|c|\). Hence
\[
\tan( \phi) = \dfrac{r}{|c|},
\]
which is constant. Therefore, the helix makes a constant angle with the cylinder's axis.
{kind=link}
{kind=link}